 埃斯顿ESTUN-工业机器人_机械臂官网
埃斯顿ESTUN-工业机器人_机械臂官网
压铸解决方案
330作为国内成立早、技术领先的压铸机周边自动化解决方案高新技术企业,埃斯顿拥有超过30年压铸行业经验,是中国压铸行业机器人自动化集成设备的重点骨干企业。致力于为压铸企业提供先进的机器人产品、周边设备及完善的自动化解决方案。 本方案提供全自动压铸...
查看全文全站搜索
方案概述
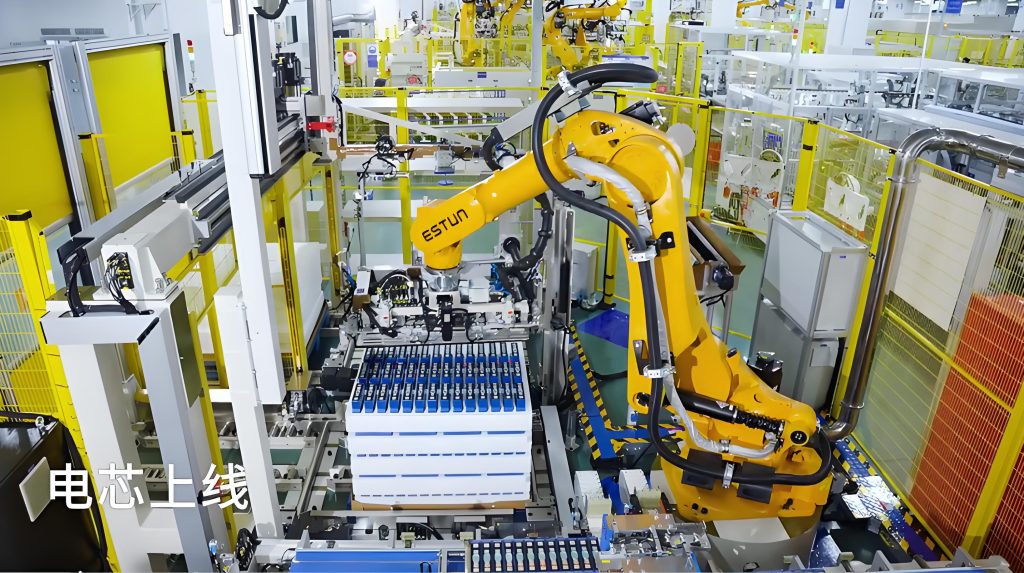
电芯上料应用于模组段第一道工序,完成来料托盘中来料电芯的上料工作。主要功能包括托盘来料电芯的视觉定位防错、视觉扫码识别、电芯的底部清洁、电芯的搬运上料等。并集成ESTUN视觉系统,提供了大包装上料完整的解决方案
案例特点
1. 高效率
采用埃斯顿280kg大负载机器人,一次可抓取12个电芯,单机节拍高。
2. 高集成度
集成ESTUN成套视觉系统,集成度高。
3. 高精度、高可靠性
ER280-3200重复定位精度±0.06mm,保证电芯上料位置的准确。



传统工装夹具难以高效处理散乱无序堆放的工件,存在柔性差、效率低及人工分拣易出错等问题。基于3D视觉的无序抓取技术应运而生,旨在提升自动化生产的灵活性、精度与安全性,满足现代制造业对柔性化产线的迫切需求。 本方案采用3D视觉系统,实现对无序工件...
查看全文
